
Os habitantes de Salamanca, cidade da cidade: a população de municípios, anexos e aldeias

A fotografia mais detalhada da população da província. É isso que o Ine Nomnclator oferece que, uma vez por ano, recebe os dados dos conselhos da cidade e coleta as informações mais detalhadas das pessoas que vivem em Salamanca
O nomenclador ou a população por unidade populacional contém a relação detalhada das entidades e centros populacionais existentes até 1º de janeiro em cada município, incluindo seus códigos e suas populações referentes a essa data. É obtido a partir da atualização dos núcleos e entidades populacionais que os municípios realizam em seus municípios e que, em conformidade com a legislação atual, comunique o INE pelo menos uma vez por ano.
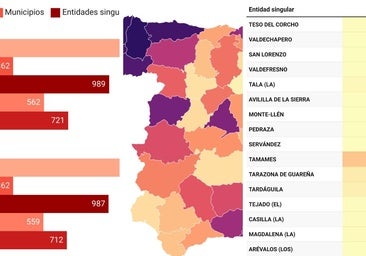
Esse relacionamento inclui 2.634 entidades de populações na província, entre os municípios e as unidades abaixo do que é uma prefeitura: entidades únicas, disseminados, anexos … no caso da província, dos 362 municípios que muitos são formados por núcleos nos quais sua população é distribuída ou que geralmente estão vazios. Este último corresponde a casas pequenas que não foram mais registradas; Muitas vezes são fazendas, fazendas agrícolas, fazendas antigas ou até mesmo, terra onde está o estádio helmántico.
No caso da capital, o maior município da província não possui anexos ou núcleos separados; A coisa mais próxima seria Tejares, que era um município independente até alguns anos atrás e que mantém sua própria prefeitura. O número de habitantes de municípios, entidades e disseminados pode ser consultado na tabela inferior.
Salamanca possui 562 núcleos em 362 municípios, mas existem outros assentamentos populacionais relevantes.
A província possui 989 entidades populacionais singulares, áreas habitáveis de um mandato municipal, habitadas ou excepcionalmente desabitadas, claramente diferenciadas nele e que têm sua própria denominação. Das quase mil entidades singulares, 211 estão vazias: o INE não registra nenhum habitante registrado.
E, finalmente, há mais de 700 divulgados, um conceito comparável às aldeias. Desses mais de 700 divulgados, cerca de 307 anos, estão atualmente desabitados. O número é semelhante ao dos últimos anos, com a incorporação de três novos núcleos vazios e cinco outros que conseguiram adicionar pelo menos um habitante.



